영상처리 5. Edge detection을 어떻게 할까
Edge Detected
엣지가 무엇인가? 픽셀의 값이 급격하게 변하는 지점이다. 엣지는 다음과 같은 종류가 있다.
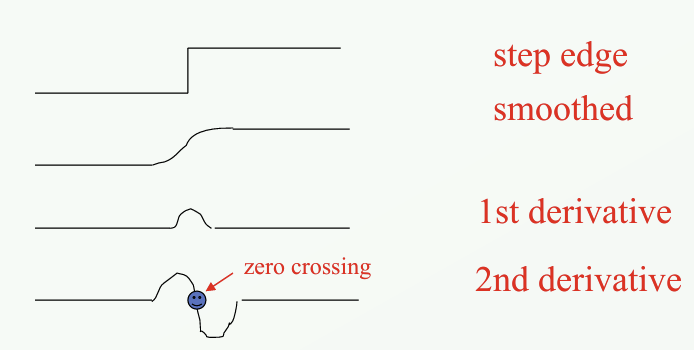
- Step Edge: 밝기가 순간적으로 급변하는 가장 이상적인 엣지.
- Ramp Edge: 밝기 변화가 점진적으로 일어나는 형태. 가장 많이 보임.
- Ridge/Roof Edge: 선이나 가는 객체에서 나타남. 밝기가 급변하고 짧은 거리 내에 다시 원래 거리로 돌아옴.
엣지를 왜 검출하는가? 이미지의 불필요한 정보는 없애면서, 핵심적인 구조적 정보를 남기기 위함이다. 이미지의 구성 요소가 무엇인지 알고 싶을 때 사용할 수 있다. 예를들어 자율주행의 경우, 현재 도로의 구성 요소가 무엇이지 파악하는게 가장 1차적으로 해야하는 목표다.
그럼 엣지 검출의 아이디어는 무엇인가? 엣지란 픽셀의 밝기 값이 급격하게 변하는 구간이다. 즉, 미분했을 때 그 값이 큰 구간이 바로 엣지다. 따라서 미분을 활용한다.
고전적인 Edge Detected 방법은 세가지가 존재한다. (1) Gradient based methods Gradient 값이 큰 곳이 바로 엣지다. 이미지는 2차원이다. 2차원 평면에서의 Gradient가 무엇을 의미하는가? \(\nabla f(x,y)\)는 함수 \(f(x,y)\)의 기울기가 가장 가파른 방향을 가리키는 벡터와 같다.
그러나 우리는 방향 정보는 필요 없고, 임의의 픽셀에서 주변 픽셀들의 변화율이 얼마나 큰지만 알면 된다. 이때 임의의 픽셀이 엣지가 되기 때문이다.
Gradient를 근사하는 Operator Type은 세가지가 존재한다.
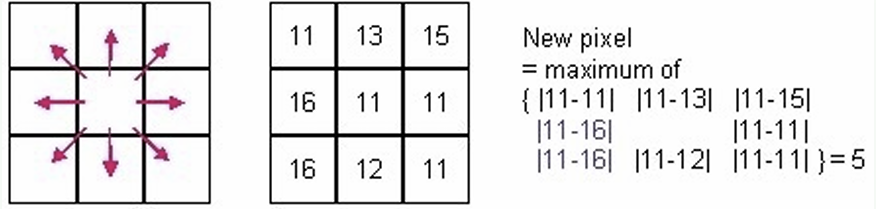
[!NOTE] Homogeneity Operators{title} 중심 픽셀과, 주변 8개 이웃 픽셀 간의 차이 중 최댓값을 계산한다. 8번의 뺄셈을 해야한다.
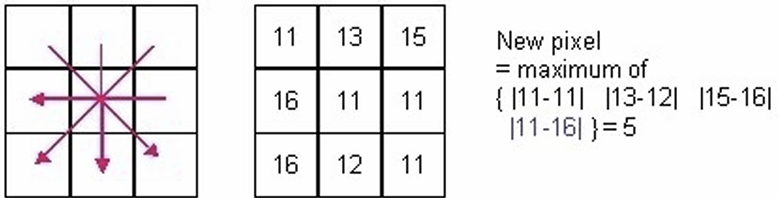
[!NOTE] Difference Operators{title} 중심 픽셀을 둘러싼 서로 마주보는 픽셀 쌍의 차이 중 최댓값을 계산한다. 4번의 뺄셈만 하면 된다.
[!NOTE] Differential Operators{title} Mask를 이용한 컨볼루션 연산이다. 가장 수학적인 미분값에 가깝다.
그라디언트를 다음과 같이 근사한다.
\[\nabla f(x,y) = \begin{pmatrix} G_{x} \\ G_{y} \end{pmatrix}= \begin{pmatrix} \frac{\partial f}{\partial x} \\ \frac{\partial f}{\partial y} \end{pmatrix} \simeq \begin{pmatrix} f(i+1, j)-f(i,j) \\ f(i,j+1)-f(i,j) \end{pmatrix}\]x축 방향 기울기는 현재 픽셀과, 바로 오른쪽 픽셀의 차이로 근사한다. y축 방향 기울기는 현재 픽셀과, 바로 아래쪽 픽셀의 차이로 근사한다.
이를 Mask로 변환하면 다음과 같다.
\[G_{x} \simeq \begin{pmatrix} -1 & 1 \end{pmatrix}, ~~G_{y} \simeq \begin{pmatrix} -1 \\ 1 \end{pmatrix}\]현재 선택된 픽셀은 마스크의 첫번째 셀에 가져다 대면, 근사한 그라디언트 식과 동일한 결과를 얻는다.
라플라스 연산은 어떻게 근사할까? 라플라스는 2차 미분이고, 2차 미분은 기울기의 기울기다. 현재 픽셀 \(f(i,j)\)를 기준으로 왼쪽 기울기와, 오른쪽 기울기를 정의해보자.
\[D_{r} = f(i+1,j) - f(i,j), ~~D_{l} = f(i,j) - f(i-1,j)\]이 둘의 차이가 기울기의 기울기 즉 2차 미분이다.
\[\frac{\partial^2f}{\partial x^2} \simeq D_{r} - D_{l}\] \[= (f(i+1,j) - f(i,j)) - (f(i,j)-f(i-1,j))\] \[= f(i+1,j) - 2 f(i,j) + f(i-1,j)\]이를 Mask로 변환하면 다음과 같다.
\[G_{x} \simeq \begin{pmatrix} 1 & -2 & 1 \end{pmatrix}\] \[G_{y} \simeq \begin{pmatrix} 1 \\ -2 \\ 1 \end{pmatrix}\]
위 Differential Operators의 아이디어를 확장하여, 고전적인 Gradient based methods에서 사용하는 세가지 Operator가 존재한다.
핵심은 각 Operator로 \(G_{x},G_{y}\)를 얻는다. 이후 다음을 계산한다.
\[g = \sqrt{ G_{x}^2 + G_{y}^2 }\]그리고 이 \(g\) 값이 Thresold 값 이상이면, 그 점은 Edge다.
필요한 경우 그라디언트의 각도도 계산 가능하다.
\[\theta = \tan^{-1}\left( \frac{G_{y}}{G_{x}} \right)\][!note] Prewitt Operator{title}
\[S_{x} = \begin{pmatrix} -1 & 0 & 1 \\ -1 & 0 & 1 \\ -1 & 0 & 1 \end{pmatrix}, ~~ S_{y} = \begin{pmatrix} 1 & 1 & 1 \\ 0 & 0 & 0 \\ -1 & -1 & -1 \end{pmatrix}\]
[!note] Sobel Operator{title}
\[S_{x} = \begin{pmatrix} -1 & 0 & 1 \\ -2 & 0 & 2 \\ -1 & 0 & 1 \end{pmatrix}, ~~ S_{y} = \begin{pmatrix} 1 & 2 & 1 \\ 0 & 0 & 0 \\ -1 & -2 & -1 \end{pmatrix}\]
[!note] Roberts Operator{title}
\[S_{x} = \begin{pmatrix} 0 & 1 \\ -1 & 0 \end{pmatrix}, ~~ S_{y} = \begin{pmatrix} 1 & 0 \\ 0 & -1 \end{pmatrix}\]Robert의 경우 연산 단축을 위해 다음 값을 g로 사용한다.
\[g= \lvert G_{x} \rvert + \lvert G_{y} \rvert\]
[!question] What is \(S_{x}, S_{y}\)?{title} \(G_{x}, G_{y}\)는 \(f(x,y)\)의 x방향, y방향의 그라디언트와 같다. \(S_{x}, S_{y}\)는 \(G_{x}\), \(G_{y}\)를 측정하기 위한 도구와 같다. \(S_{x}, S_{y}\)로 그라디언트 값을 근사할 수 있다
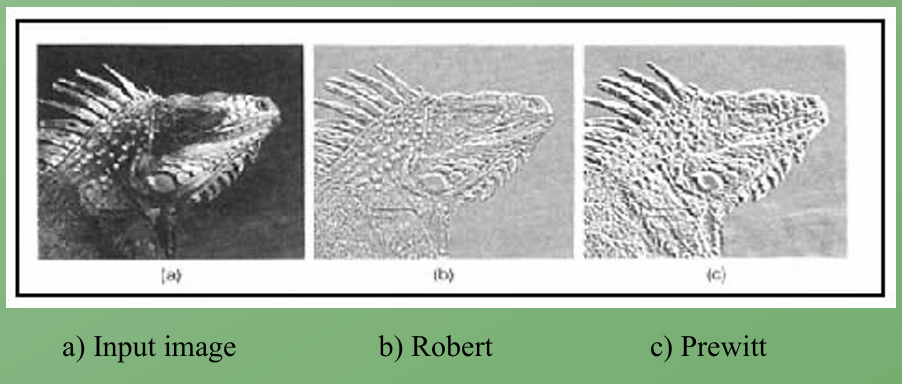
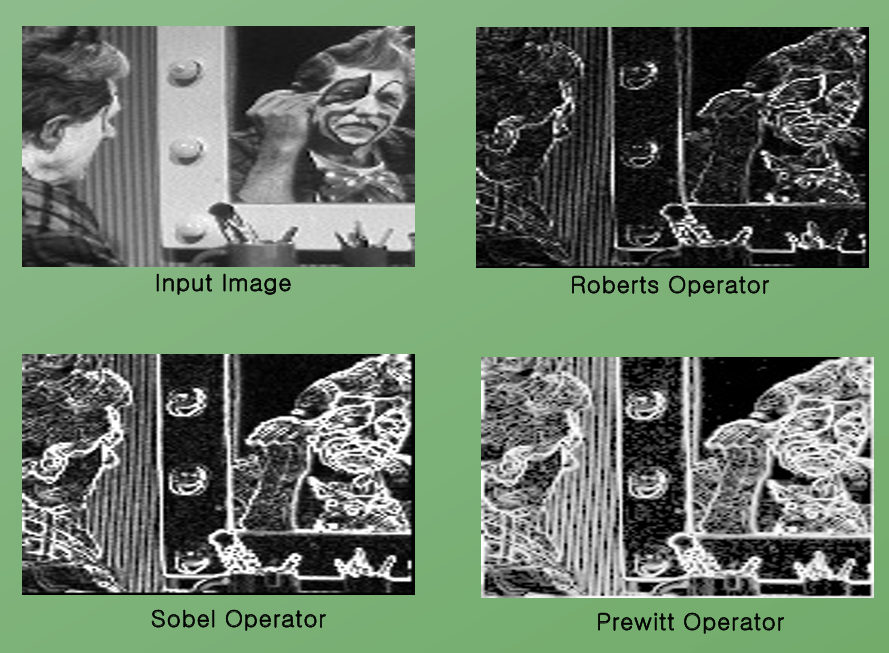
[!example] example{title}
(2) Zero-crossing based methods
1차 미분은 ‘어디까지가 변화율이 큰 값인가?’ 를 정해야 하는 문제가 있었다. 그 기준값인 Thresold을 설정해야 했다. 이는 엣지가 너무 두꺼워지는 단점이 있었다.
어차피 엣지는 기울기의 변화량이 가장 큰 지점이다. 이는 2차 미분으로 찾을 수 있다. 기울기가 최대가 되는 지점은, 2차 미분의 Zero crossing 지점과 같다. 이를 Edge로 설정하면, Edge를 한 픽셀로 정확하게 결정localize할 수 있다.
2차 미분을 근사하는 필터는 Laplacian Operator이다.
\[\begin{pmatrix} 0 & 1 & 0 \\ 1 & -4 & 1 \\ 0 & 1 & 0 \end{pmatrix}\]이 마스크를 각 픽셀에 적용 후, 부호가 바뀌는 지점이 바로 Edge와 같다. 그러나 문제가 있다…
(3) Gaussian based methods 위 두 방법은 엣지와 노이즈를 구분할 수 없다. 노이즈란 무엇이었는가? 바로 값이 ‘팍 튀는’ 지점이다. 즉, ‘밝기 변화가 큰 곳’이 엣지인데, 둘을 구분할 수 없다.
따라서 정확한 엣지 검출을 위해, 먼저 스무딩 과정이 필요하다. 1차 미분 전에 가우시안 스무딩을 하는 방법과, 2차 미분 전에 가우시안 스무딩을 하는 방법. 마지막으로 고급 방법까지 세가지 방법을 알아보자.
[!NOTE] Derivative of Gaussian{title} 1차 미분 전에 가우시안 스무딩을 하는 방법이다. 미분 연산은 컨볼루션이다. 따라서 결합 법칙이 성립한다. 연산을 1회 줄일 수 있다.
\[\frac{\partial}{\partial x} (f * G) = f * \frac{\partial G}{\partial x}\]\(G\)는 가우시안 Kernel이다.
\(\frac{\partial G}{\partial x}\) 가 무엇인가? 가우시안 함수는 다음과 같다.
\[G(x,y) = e^{- (x^2 + y^2) / 2 \sigma^2}\]이를 \(x\)에 대해 미분하면 다음과 같다.
\[\frac{\partial G}{\partial x} = - \frac{x}{\sigma^2} e^{- (x^2 + y^2) / 2 \sigma^2}\]이를 Kernel로 만들기 위해 \(\sigma\) 파라미터를 정하고, 가운데 값을 \((x=0,y=0)\)으로 지정하고 각 Cell에 맞는 \(x, y\) 값을 대입한다. ex) 가운데 윗칸 = \((1, 0)\)
[!NOTE] Laplacian of Gaussian (LoG)
(Marr and Hildreth Operator){title} 2차 미분 전에 가우시안 스무딩을 하는 방법이다. 방법은다음과 같다.
- 가우시안 스무딩 적용
- Laplacian Operator 적용하여 2차 미분값 계산
- 계산한 결과에서 Zero crossing 찾기
- 1차 미분값이 임계값 이상인 Zero crossing만 유효한 엣지로 인정
노이즈에 강하다. 라플라시안은 이렇게 활용하면 된다.
[!NOTE] Canny Edge Operator{title} 과정은 다음과 같다.
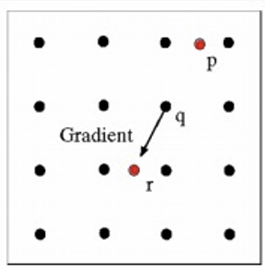
먼저, (1) 가우시안 스무딩을 적용한다. 이후 (2) Gradiant의 크기와 방향을 계산한다. 그라디언트 방향을 보고 픽셀 강도가 최대인 픽셀만 남긴다. 이것이 (3) Non-maximum Suppression 과정이다.
현재 처리중인 픽셀을 p라고 하자. 그라디언트 방향에 따라 바로 앞뒤 픽셀과 비교한다. 자신이 이웃 픽셀보다 큰 경우만 생존하고, 그렇지 않은 경우 엣지로 취하지 않는다. 이 과정을 통해 두꺼운 엣지가 얇은 엣지로 변환된다.
높은 임계값과 낮은 임계값을 사용해 확실한 엣지, 엣지 가능성, 엣지가 아닌 것을 구분한다. 높은 임계값 위의 엣지는 확실한 엣지고, 높은 임계값과 낮은 임계값 사이에 있는 엣지는 엣지가 될 가능성이 있는 애들이고, 낮은 임계값보다 낮은 엣지는 버린다. 이를 (4) Doubole threshold라고 한다.
(5) 이후 애매한 엣지는 확실한 엣지와 연결되어 있을 때만 엣지로 취급한다. 그렇지 않은 경우 버린다. 이 과정으로 노이즈 떄문에 생긴 가짜 엣지들을 효과적으로 제거할 수 있다.
(5) 과정에서, 확실한 엣지와 연결되어 있다는 것을 어떻게 판단할 수 있을까? 먼저 확실한 엣지를 찾으면, 그 픽셀을 중심으로 주변 8개의 이웃 픽셀을 확인한다. 그 이웃 픽셀 중 애매한 엣지가 있다면, 그 애매한 엣지를 확실한 엣지로 승격한다. 이 과정을 연쇄적으로 진행하면, 확실한 엣지와 연결되어 있던 모든 애매한 엣지가 확실한 엣지로 확산된다.
어떤 방법을 쓰는게 제일 좋을까?
Roberts, Prewitt, Sobel은 매우 빠르고 간단하다. 그러나 노이즈에 취약하고, 엣지가 두껍게 나온다. 노이즈가 거의 없고, 실시간 처리가 중요할 때 사용할 수 있다.
LoG는 엣지 위치를 정확하게 찾으며, 위 방법보다는 노이즈에 강하다.
Canny는 노이즈에 가장 강하고, 위치가 정확하며, 엣지 연결성 우수하다. 다만 계산양이 가장 많다. 대부분의 응용 분야에서 standard 방법으로 인정받는다.
\[\text{1980년대 후반에 나온 이후로 아무도 이보다 더 나은 것을 만들지 못했다.}\]