고급컴퓨터그래픽스 1. Curves
건국대학교 고급컴퓨터그래픽스 김형석 교수님의 수업을 정리한 내용입니다.
Circle
[!note]- 원 그리기{title} \((x_{c}, y_{c})\)가 중심이고, 반지름이 \(r\)인 원의 방정식은 다음과 같다.
\[y=y_{c} \pm \sqrt{ r^2 - (x-x_{c})^2 }\] \[f(x,y) = (x-x_{c})^2+(y-y_{c})^2-r^2=0\] \[x(\theta) = x_{c}+ r\cos \theta, ~~~y(\theta)= y_{c} + r\sin \theta\]첫번째 방식이 Explicit, 두번째 방식이 Implicit, 세번째 방식이 Parametric.^[Equation (방정식)#방정식의 모양]
Explicit Equation 사용
\[y=y_{c} \pm \sqrt{ r^2 - (x-x_{c})^2 }\]x를 \(x_{c}-r \leq x \leq x_{c}+r\) 범위에서 for문 돌려서 dx
(=0.1, 0.05)만큼 증가시키면 그릴 수 있을 듯.하지만 단점이 있다.
- Sqrt 연산은 계산이 느리다.
한두개면 괜찮은데, 방대한 반복 연산을 해야하기 때문에 Sqrt같은 복잡한 연산은 피하는게 좋다.
- 간격이 Uniform하지 않다.
x가 0.1씩 증가하면, 어떨땐 y가 조금 감소하지만 어떨땐 y가 크게 감소해서 빈 공간이 생길 수 있다. => 빈칸 사이에 선을 그려서 채우는 방법을 쓸 수 있지만, 부자연스러움.
Parametric Equation 사용
\[x(\theta) = x_{c}+ r\cos \theta, ~~~y(\theta)= y_{c} + r\sin \theta\]Polar coordinate (극좌표계) 를 사용한다.
이걸 사용하면, \(\theta\)를 0.1씩 증가시키면 원 호가 균일하게 그려져서, Explicit Equation을 사용했을 때 단점을 해결할 수 있다.
하지만, sin, cos가 있어서 아직 계산이 복잡하다.
또, 각도를 몇도씩 증가시키는게 좋을지 원의 크기에 따라 달라진다.
- 원이 너무 작으면, 1도씩 증가하면 중복 픽셀이 생기고,
- 원이 너무 크면, 1도씩 증가하면 픽셀이 듬성듬성 채워질 것이다.
Implicit Equation 사용
\[f(x,y) = (x-x_{c})^2+(y-y_{c})^2-r^2=0\]이걸 도대체 어떻게 쓰는데?
이 방정식에는 중요한 의미가 있다.
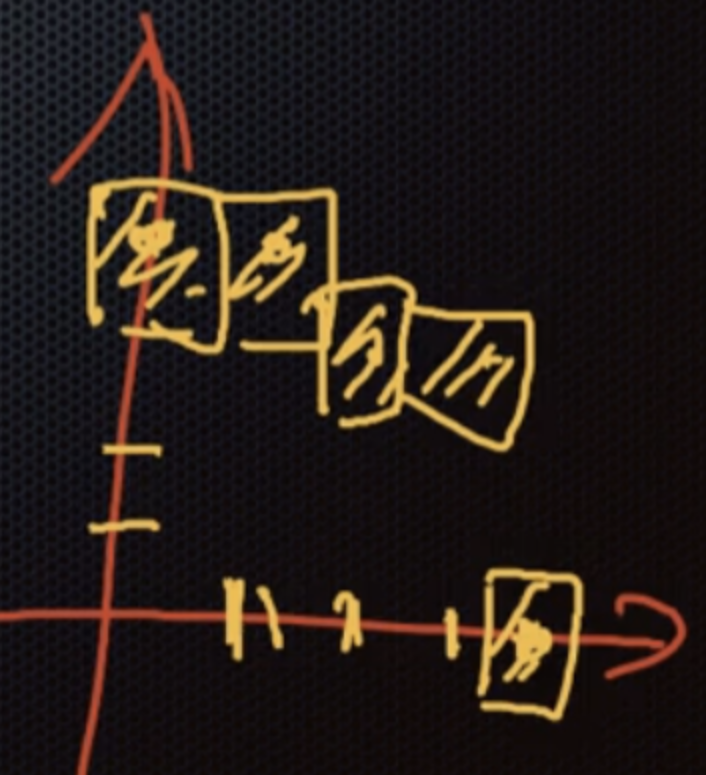
\((x, y)\) 값을 \(f(x, y)\)에 넣었을 때 0이 나오면 원의 테두리, +면 원의 밖, -면 원의 안쪽에 있다는 의미다.
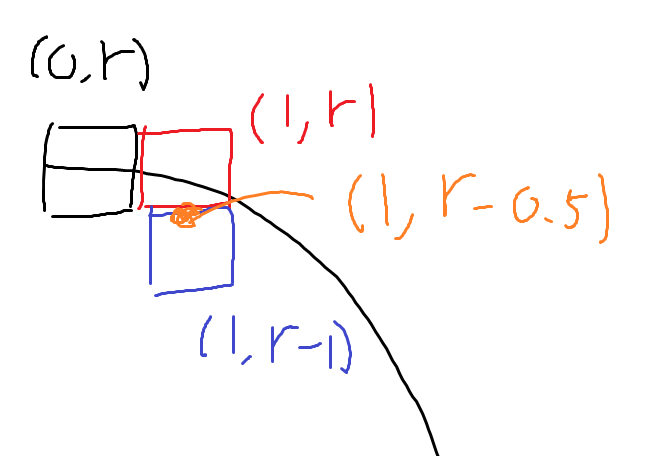
픽셀 한칸 단위를 1이라고 하면, \((x, y)\) 점에서 시작하여 \(x+1\)일 때 픽셀을 어디에 그릴지 \(f(x, y)\)에 \((x+1, y-0.5)\) 또는 \((x+1, y+0.5)\)를 넣어 나온 결과로 판단하는 방법이다.
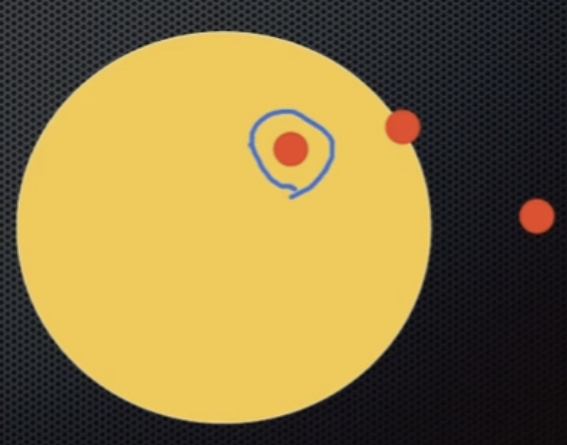
예를들어, \((0, r)\)에서 시작한다.
\(f(x, y)\)에 그려질 가능성이 있는 두 픽셀의 중간점인 \((x+1, y-0.5)\)를 넣는다. \(p_{k} = f(x_{k}+1, y_{k}-0.5)\)라고 정의했을 때, \(p_{0} < 0\)이면 파란색 점을 그리고, \(p_{0} \geq 0\)이면 빨간색 점을 그리면 된다.
즉, 현재 그리는 점의 좌표를 \((x_{k}, y_{k})\)라고 하면 다음 그릴 점의 좌표는 \((x_{k+1}, y_{k+1})\)이다.
위 곡선의 경우 \(p_{k}\)와 \(y_{k+1}\)는 다음과 같다.
\[p_{k} = f(x_{k}, y_{k}-0.5)\] \[y_{k+1} = \begin{cases} y_{k}~~~~~~~~~~~~ if~~p_{k} < 0 \\ y_{k}-1 ~~~~~if~~p_{k} \geq 0\end{cases}\]위 두 값은 곡선의 기울기에 따라 알맞게 설정하면 된다. 이 방법을 Midpoint Circle Drawing 라고 부른다.
위 방법을 사용하면 이런 장점이 있다.
- 덧셈, 곱셈만 있어 계산이 간단하다
- 픽셀이 한칸씩 움직여 간격이 Uniform해진다.
좀 더 계산량을 줄일 수 없을까?
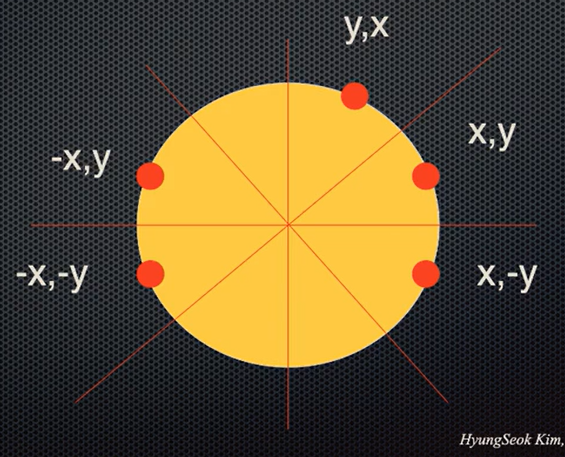
- Symmetry(대칭성)을 이용한다.
원의 1/8만 그려도 나머지는 대칭성을 이용해서 점을 찍을 수 있다.
즉, 한번 계산할 때마다 8개의 점을 찍으면 됨.
- 원의 좌표를 계산할 때, 원점을 기준으로 계산하여 나온 결과에 \((x_{c}, y_{c})\)를 더해 이동시킨다.
이렇게 하면 \(f(x, y) = x^2 + y^2 - r^2\)로 간단히 쓸 수 있고, 나온 결과에 +\(x_{c}\), +\(y_{c}\)를 해주면 된다.
\[p_{k+1} - p_{k} = (x_{k+1}+1)^2 + (y_{k++1}-0.5)^2 - r^2 - (x_{k}+1)^2 - (y_{k}-0.5)^2 + r^2\]
- 이전의 계산한 \(p_{k}\)를 바탕으로 \(p_{k+1}\)을 계산한다.
\(x_{k+1} = x_{k}+1\)이므로
\[= (x_{k}+2)^2 + (y_{k+1}-0.5)^2 - (x_{k}+1)^2 - (y_{k}-0.5)^2\]\(p_{k} < 0\)인 경우, \(y_{k+1} = y_{k}\)
\[=2x_{k}+3 = 2x_{k+1}+1\]\(p_{k} \geq 0\)인 경우, \(y_{k+1}=y_{k}-1\)
\[= 2x_{k}+3 + (y_{k} - 1.5)^2 - (y_{k}-0.5)^2\] \[=2x_{k}+3+y_{k}^2-3y_{k}+2.25-y_{k}^2+y_{k}-0.25\] \[=2x_{k}-2y_{k}+5 = 2x_{k+1}-2y_{k+1}+1\]OK, \(p_{0}\)만 알면 위 정보를 토대로 \(p_{1}, p_{2}, \dots\)를 간단하게 알 수 있겠다.
\[p_0 = f(1, r-0.5)\] \[= 1 + (r-0.5)^2 - r^2\] \[= 1.25 - r\]구현 의사코드
\((0, r)\)에서 시작하여 1/8만큼만 그리면 된다. => x의 값이 y의 값보다 커질 때까지 Loop 돌면 됨.
[!NOTE]- 타원 그리기{title}
타원은 두 조첨의 좌표와, 두 초점 사이의 거리의 합(d)를 알아야 한다.
\[\sqrt{ (x-x_{1})^2 + (y-y_{1})^2 } + \sqrt{ (x-x_{2})^2 + (y-y_{2})^2 } = d\]타원의 방정식은 위와 같은데, 너무 더럽다.
정직하게 장축, 단축이 x축, y축 위에 있고 원점이 중심이면 훨씬 간결하게 만들 수 있다.
\[\left( \frac{x}{r_{x}} \right)^2+\left( \frac{y}{r_{y}} \right)^2=1\]
\(r_{x}\) = 장축의 길이, \(r_{y}\) = 단축의 길이
이걸 그리고, 타원을 회전해서 \((x_{c}, y_{c})\)만큼 움직이면 임의의 타원을 그리는 것과 같음.
이제 \(f(x, y)\) 설정하고, \(p_{k}\)와 \(y_{k+1}\)을 정해서 \(p_{k+1} - p_{k}\)를 구하면 된다.
\[f(x,y) = \left( \frac{x}{r_{x}} \right)^2+\left( \frac{y}{r_{y}} \right)^2 -1 = 0\]
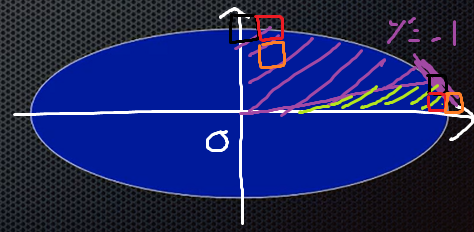
타원은 1/4만큼만 그리면 된다. \((0, r_{y})\) ~ \((r_{x}, 0)\) 범위를 그리면 됨.
주의할 점이, 기울기 \(-1\)을 기준으로 \(p_{k}\), \(x_{k+1}\), \(y_{k+1}\)이 바뀌어야 한다.
보라색 범위에선 x가 1 증가할 때 y가 증가하지 않거나 -1 만큼 감소할 것이고, 연두색 범위에선 y가 1 감소할 때 x가 증가하지 않거나 +1 만큼 증가할 것이다.
\[p_{k} = \begin{cases} f(x_{k}+1, y_{k}-0.5)~~~~~ if~~ \frac{dy}{dx} < -1 \\ f(x_{k}+0.5, y_{k}-1) ~~~~~if~~ \frac{dy}{dx} \geq -1 \end{cases}\]\[x_{k+1} = x_{k} + 1\] \[y_{k+1} = \begin{cases} y ~~~~~~~~~~if~~ p_{k} < 0 \\ y-1 ~~~if~~ p_{k} \geq 0 \end{cases}\]
- 보라색 범위
\[x_{k+1} = \begin{cases} x ~~~~~~~~~~if~~ p_{k} < 0 \\ x+1 ~~~if~~ p_{k} \geq 0 \end{cases}\] \[y_{k+1} = y_{k} - 1\]
- 연두색 범위
1) \(\frac{dy}{dx} < -1\)일 때, \(p_{k+1} - p_{k}\)
\[p_{k+1} - p_{k} = \left( \frac{x_{k+1}+1}{r_{x}} \right)^2 + \left( \frac{y_{k+1}-0.5}{r_{y}} \right)^2 - 1 - \left( \frac{x_{k}+1}{r_{x}} \right)^2 - \left( \frac{y_{k}-0.5}{r_{y}} \right)^2 + 1\] \[= \left( \frac{x_{k}+2}{r_{x}} \right)^2 + \left( \frac{y_{k+1}-0.5}{r_{y}} \right)^2 - \left( \frac{x_{k}+1}{r_{x}} \right)^2 - \left( \frac{y_{k}-0.5}{r_{y}} \right)^2\] \[= \frac{2x_{k}+3}{{r_{x}}^2} + \left( \frac{y_{k+1}-0.5}{r_{y}} \right)^2 - \left( \frac{y_{k}-0.5}{r_{y}} \right)^2\]if \(p_{k} < 0\) => \(y_{k+1} = y\)
\[p_{k+1} - p_{k} = \frac{2x_{k}+3}{{r_{x}}^2} = \frac{2x_{k+1}+1}{{r_{x}}^2}\]if \(p_{k} \geq 0\) => \(y_{k+1} = y_{k}-1\)
\[p_{k+1} - p_{k} = \frac{2x_{k}+3}{{r_{x}}^2} + \left( \frac{y_{k}-1.5}{r_{y}} \right)^2 - \left( \frac{y_{k}-0.5}{r_{y}} \right)^2\] \[= \frac{2x_{k}+3}{{r_{x}}^2} + \frac{-2 y_{k} + 2}{{r_{y}}^2}\] \[= \frac{2x_{k+1}+1}{{r_{x}}^2} + \frac{-2y_{k+1}}{{r_{y}}^2}\]2) \(\frac{dy}{dx} \geq -1\)일 때, \(p_{k+1} - p_{k}\)
\[p_{k+1}-p_{k} = \left( \frac{x_{k+1}+0.5}{r_{x}} \right)^2 + \left( \frac{y_{k+1}-1}{r_{y}} \right)^2 -1 - \left( \frac{x_{k}+0.5}{r_{x}} \right)^2 - \left( \frac{y_{k} -1}{r_{y}} \right)^2 +1\] \[= \left( \frac{x_{k+1}+0.5}{r_{x}} \right)^2 - \left( \frac{x_{k}+0.5}{r_{x}} \right)^2 + \left( \frac{y_{k}-2}{r_{y}} \right)^2 - \left( \frac{y_{k}-1}{r_{y}} \right)^2\] \[= \left( \frac{x_{k+1}+0.5}{r_{x}} \right)^2 - \left( \frac{x_{k}+0.5}{r_{x}} \right)^2 + \frac{-2y_{k} + 3}{{r_{y}}^2}\]if \(p_{k} < 0\) => \(x_{k+1} = x\)
\[p_{k+1} - p_{k} = \frac{-2y_{k} + 3}{{r_{y}}^2} = \frac{-2y_{k+1} + 1}{{r_{y}}^2}\]if \(p_{k} \geq 0\) => \(x_{k+1} = x+1\)
\[p_{k+1} - p_{k} = \left( \frac{x_{k}+1.5}{r_{x}} \right)^2 - \left( \frac{x_{k}+0.5}{r_{x}} \right)^2 + \frac{-2y_{k} + 3}{{r_{y}}^2}\] \[= \frac{2x_{k} + 2}{{r_{x}}^2} + \frac{-2y_{k} + 3}{{r_{y}}^2}\] \[= \frac{2x_{k+1}}{{r_{x}}^2} + \frac{-2y_{k+1} + 1}{{r_{y}}^2}\]3) \(p_{0}\)
\[p_{0} = f(x_{0} + 1, y_{0} - 0.5)\] \[= f(1, r_{y} - 0.5)\] \[= \left( \frac{1}{r_{x}} \right)^2 + \left( \frac{r_{y}-0.5}{r_{y}} \right)^2 - 1\] \[= \frac{1}{{r_{x}}^2} + \left( 1- \frac{0.5}{r_{y}} \right)^2 - 1\]구현 의사코드
\((0, r)\)에서 시작하여 1/4만큼만 그리면 된다. => y의 값이 0과 같거나 작아질 때까지 Loop 돌면 됨.
회전 => (x, y) 벡터에 Rotate Matrix (회전 행렬) 적용.
to GPT
Curves
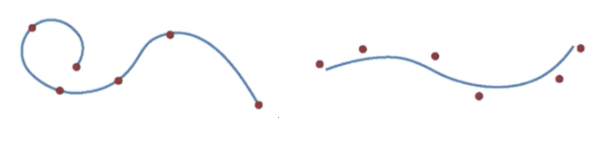
여러개의 점을 Fitting하는 적당한 곡선을 찾는 방법. 점을 반드시 지나가게 하는 방법을 보간(Interpolation)한다고 한다.
Polynomial Curve을 사용한다. 다항 곡선은 \(\displaystyle P(u) = \sum_{k=0}^{n} P_{k}B_{k}(u) = UMP\)와 같은 표현식을 갖는다. \(B_{k}\)는 Basic Function이며 어떤 Basic Function을 사용하냐에 따라서 Curve의 종류가 다르다.
Bezier Curve
- Bezier Curve : \(\displaystyle P(u) = \sum_{k=0}^{n} P_{k} B_{k,n}(u)\)
- \(P_{k}\) = Control Point의 Position.
- \(B_{k, n}(u) = nCk \cdot u^k (1-u)^{n-k}\)
- Cubic Bezier Curve : \(\displaystyle P(u) = \sum_{k=0}^{3} P_{k} B_{k,3}(u) =\left[ \begin{matrix} u^3 & u^2 & u & 1 \end{matrix} \right] \left[ \begin{matrix} 1 & 3 & -3 & 1 \\ 3 & -6 & 3 & 0 \\ -3 & 3 & 0 & 0 \\ 1 & 0 & 0 & 0 \end{matrix} \right] \left[ \begin{matrix} p_{i} \\ p_{i+1} \\ p_{i+2} \\ p_{i+3} \end{matrix} \right]\)
- \(B_{0,3}(u) = (1-u)^3\)
- \(B_{1,3}(u) = 3u(1-u)^2\)
- \(B_{2,3}(u) = 3u^2(1-u)\)
- \(B_{3,3}(u) = u^3\)
점 n개를 사용해서 양 끝점을 반드시 지나고, 중간 점을 가까이 지나가게 하는 곡선을 생성한다. 파라미터 \(u\)는 \(u \in [0, 1]\) 범위를 갖는다. 차수가 높을 수록 Basis Function 계산이 힘들어지기 때문에, 일반적으로 Cubic(3차) Bezier Curve를 사용한다.
Cubic Bezier Curve는 컨트롤 포인트 4개 사이의 곡선을 보간한다. \(p_{i+1}, p_{i+2}\)가 지나는 것을 보장하지 않는다.
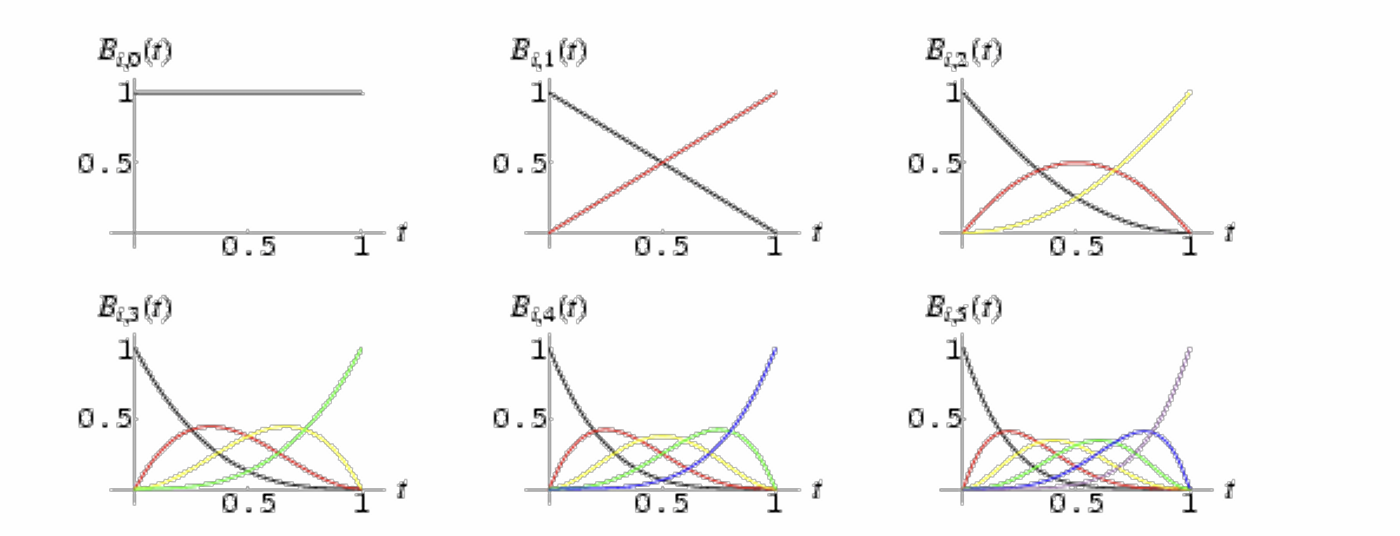
[!tip]- Info Basis Function{title} Basis Function을 Convex Combination(컨벡스 콤비네이션) 방식으로 조합된다. Convex Combination이란, Basis Function는 전부 0 이상이며, 전부 더하면 1이 나오도록 설계되었다는 뜻이다.
- 1차 Basis Function
- \(B_{0,1}(u) = 1-u\)
- \(B_{1,1}(u) = u\)
- 2차 Basis Function
- \(B_{0,2}(u) = (1-u)^2\)
- \(B_{1,2}(u) = 2u(1-u)\)
- \(B_{2,2}(u) = u^2\)
- 3차 Basis Function
- \(B_{0,3}(u) = (1-u)^3\)
- \(B_{1,3}(u) = 3u(1-u)^2\)
- \(B_{2,3}(u) = 3u^2(1-u)\)
- \(B_{3,3}(u) = u^3\)
- n차 Basis Function
- \(B_{k, n} = nCk \cdot u^k (1-u)^{n-k}\)
Hermite Curve
- \(\displaystyle P(u) = \sum_{k=0}^{3} g_{k} H_{k}(u) P(u) = \left[ \begin{matrix} u^3 & u^2 & u & 1 \end{matrix} \right] \left[ \begin{matrix} 2 & -2 & 1 & 1 \\ -3 & 3 & -2 & -1 \\ 0 & 0 & 1 & 0 \\ 1 & 0 & 0 & 0 \end{matrix} \right] \left[ \begin{matrix} p_{i} \\ p_{i+1} \\ p_{i}' \\ p_{i+1}' \end{matrix} \right]\)
- \(g_{0} = p_{0}\), \(g_{1} = p_{1}\), \(g_{2} = p_{0}'\), \(g_{3} = p_{1}'\)
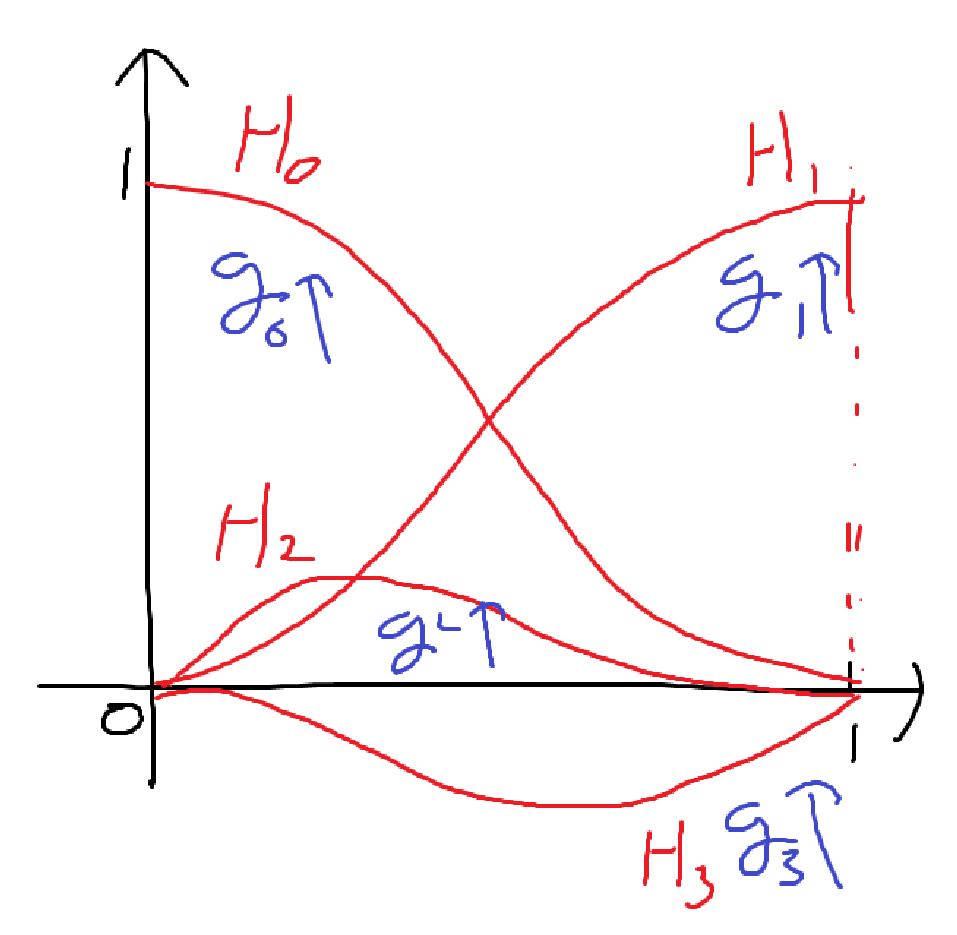
- \(H_{0}(u) = 2u^3 - 3u^2 + 1\)
- \(H_{1}(u) = -2u^3 + 3u^2\)
- \(H_{2}(u) = u^3 -2u^3 + u\)
- \(H_{4}(u) = -2u^3 - u^2\)
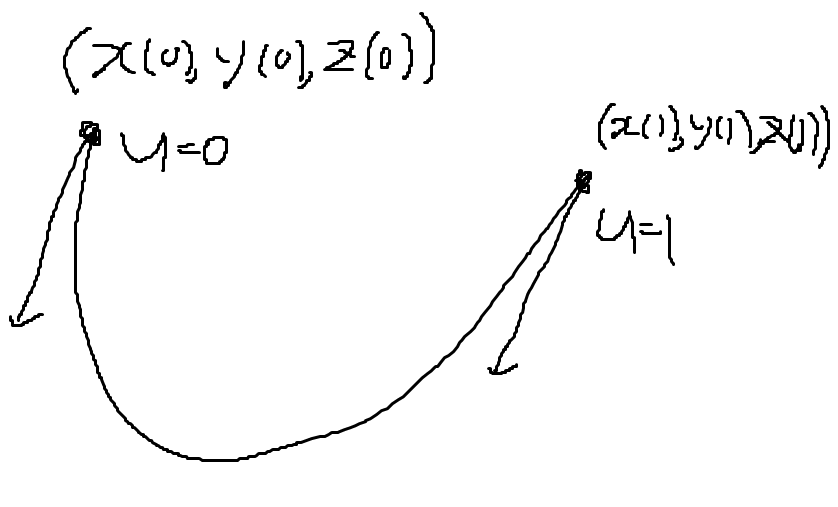
두 점과, 두 점에서의 기울기를 통해 두 점을 지나가는 곡선을 생성한다. 파라미터 \(u\)는 \(u \in [0, 1]\) 범위를 갖는다. \(g_{k}\)의 \(p_{0}\), \(p_{1}\)를 시작점과 끝점, \(p_{0}'\), \(p_{1}'\) 를 시작점과 끝점에서의 기울기라고 정의한다.
\(H_{k}(u)\)는 Basis Function라고 불리며, 위와 같다.
[!tip]- Basic Function의 유도 과정{title}
각 성분마다 4개의 미지수가 존재한다. 시작점과 끝점 좌표, 시작점에서의 기울기와 끝점에서의 기울기를 정해주면 4개의 방정식이 주어지므로 곡선 하나를 특정할 수 있게 된다. 시작점의 u를 0, 끝점의 u를 1이라고 하자.
\[x'(u) = 3a_{x}u^2 + 2b_{x}u + c_{x}\] \[x(0) = d_{x}, ~~ x(1) = a_{x} + b_{x} + c_{x} + d_{x}\] \[x'(0) = c_{x}, ~~x'(1) = 3a_{x} + 2b_{x}\]이걸 가지고 \(a_{x}, b_{x}, c_{x}, d_{x}\)를 구하면
\[a_{x} = 2x(0) - 2x(1) + x'(0) - 2x'(1)\] \[b_{x} = -3x(0) + 3x(1) - 2x'(0) - x'(1)\]\(c_{x}=x'(0)\), \(d_{x} = x(0)\)
이 정보를 가지고 \(x(u)\)를 다르게 표현해보자.
\[x(u) = a_{x}u^3 + b_{x}u^2 + c_{x}u + d_{x}\] \[= \begin{bmatrix} u^3 & u^2 & u & 1\\ \end{bmatrix} \cdot \begin{bmatrix} a_{x}\\ b_{x} \\ c_{x} \\ d_{x} \end{bmatrix}\] \[= \begin{bmatrix} u^3 & u^2 & u & 1\\ \end{bmatrix} \cdot \begin{bmatrix} 2x(0) - 2x(1) + x'(0) - 2x'(1)\\ -3x(0) + 3x(1) - 2x'(0) - x'(1) \\ x'(0) \\ x(0) \end{bmatrix}\] \[= \begin{bmatrix} u^3 & u^2 & u & 1\\ \end{bmatrix} \begin{bmatrix} 2 & -2 & 1 & -2\\ -3 & 3 & -2 & -1 \\ 0 & 0 & 1 & 0 \\ 1 & 0 & 0 & 0 \end{bmatrix} \begin{bmatrix} x(0) \\ x(1) \\ x'(0) \\ x'(1) \end{bmatrix}\] \[= \begin{bmatrix} 2u^3 - 3u^2 + 1 & -2u^3 + 3u^2 & u^3 - 2u^2 + u & -2u^3 - u^2\\ \end{bmatrix} \begin{bmatrix} x(0) \\ x(1) \\ x'(0) \\ x'(1) \end{bmatrix}\] \[= \begin{bmatrix} H_{0}(u) & H_{1}(u) & H_{2}(u) & H_{3}(u)\\ \end{bmatrix} \begin{bmatrix} x(0) \\ x(1) \\ x'(0) \\ x'(1) \end{bmatrix}\]\(x(0)\), \(x(1)\), \(x'(0)\), \(x'(1)\)는 \(g_{0}, g_{1}, g_{2}, g_{3}\)으로 적을 수 있으며, 가중치 역할(Control Parameter) 을 한다.
[!tip]- Basis Function와 Control Paramater의 의미{title}
\(P(u)\)는 Basis Function과 가중치 \(g_{k}\)의 결합과 같다.이다. 이 4개의 Basis Function을 잘 결합하여 모든 곡선을 만들 수 있다. \(g_{0}\)이 클수록 \(H_{0}\) 함수에 가까워지고, \(g_{1}\)이 클수록 \(H_{1}\)의 함수에 가까워지므로 \(g_{k}\)가 가중치의 역할을 한다.
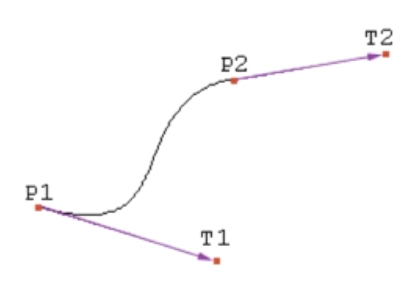
[!tip]- 구현 팁{title}
기울기를 입력받기 위해, \(T_{1}\), \(T_{2}\) 점을 추가로 생성한다. 두 점을 움직여 기울기를 조절할 수 있도록 구현하면 된다. 기울기는 \(p_{2}-T_{2}\)와 같이 계산하면 된다.
Continuity
얼마나 연결되어있는지 측정하는 지표.
- \(C^0\) Continuity : 위치만 연속이다.
- \(P_{1}(1) = P_{2}(0)\)
- \(C^1\) Continuity : 위치도 같고, 기울기도 같을 때
- \(P_{1}(1) = P_{2}(0) ~\cap~ P_{1}'(1) = P_{2}'(0)\)
- \(C^2\) Continuity : 위치도 같고, 기울기도 같고, 가속도도 같을 때
- \(P_{1}(1) = P_{2}(0) ~\cap~ P_{1}'(1) = P_{2}'(0) ~ \cap ~ P_{1}''(1) = P_{2}''(0)\)
애니메이션을 만들거나 게임을 만든다고 하면 제어점이 움직이는 것 까지 고려된다. 따라서 가속도가 동기화되어야 자연스러운 곡선의 움직임이 나온다.
Geometric Continuity
- \(G^0\) Continuity : \(C^0\) Continuity와 동일함.
- \(G^1\) Continuity : 접선 연속성. 기울기의 방향은 같지만 크기는 다를 수 있다.
- \(P'_{1}(1) = \alpha P'_{2}(0)\)
- \(G^2\) Continuity : 곡률 연속성.
- \(\displaystyle \frac{\lvert P_{1}' \times P_{1}'' \rvert}{\lvert P_{1}' \rvert^3}\mid_{u=1} = \frac{\lvert P_{2}' \times P_{2}'' \rvert}{\lvert P_{2}' \rvert^3}\mid_{u=0}\)
Geometric Continuity는 말 그대로 ‘모양적으로’ 자연스러우면 될 때 사용한다. 그래픽, 산업 디자인에서 사용한다. Continuity는 애니메이션에서 사용한다.
Spline
여러개의 Curve를 연걸하여 만들어지는 하나의 매끄러운 곡선이다. 이때 곡선들이 만나는 점을 Knot라 부른다.
- Bezier Spline
- Deg : 3
- Continuity : \(C^0\) or \(C^1\)
- Tangents : manual
- Interpolation : some
- Use Case : shapes, font & vector graphics
- Hermite Spline
- Deg : 3
- Continuity : \(C^0\) or \(C^1\)
- Tangents : explicit
- Interpolation : all
- Use Case : animation, physics sim & interpolation
- Catnull-Rom Spline
- Deg : 3
- Continuity : \(C^1\)
- Tangent : auto
- Interpolation : all
- Use Case : animation & path sommthing
- B-Spline
- Deg : 3
- Continuity : \(C^2\)
- Tangents : auto
- Interpolation : none
- Use Case : curvature-sensitive shapes & animations, such as camera paths
- Linear Spline
- Dag : 1
- Continuity : \(C^0\)
- Tangents : auto
- Interpolation : all
- Use Case : dense data & interpolation where smoothness doesn’t matter
Bezier Spline
- \(\displaystyle P(u) = \begin{cases} P_{0}(u) & 0 \leq u < 1 \\ P_{1}(u-1) & 1 \leq u < 2 \\ P_{2} (u-2) & 2 \leq u < 3 \\ \dots \end{cases}\)
- \(P_{i}(u-i) =\) \(i\)번째 Bezier Curve
Cubic Bezier Curve를 여러개 이어서 하나의 매끄러운 곡선을 만드는 경우, Bezier Spline이다.
하나의 곡선 \(P(u)\)는 파라미터 \(u\)가 \([0, 1]\)의 범위를 갖는다. 만약 곡선을 \(n\)개 이어붙여 Spline을 만들고자 한다면, Spline 함수 \(P(u)\)의 \(u\)는 \(u\in[0,n]\)의 범위를 가지면 된다. 이후 \(u\)값을 보고, \(i\)번째 Bezier Curve를 사용해야 한다면 \(P(u) =P_{i}(u-i)\)로 위치를 계산한다.
Continuity를 만족시킬수록 사용자가 컨트롤할 수 있는 컨트롤 포인트의 수는 줄어들고, 이는 Local Control 제어권을 잃게 된다. Continuity를 덜 만족시킬 수록 Local Control 제어권이 자유로워진다. 포토샵 벡터와 같은 곳에서 Bezier Spline을 사용한다.
[!example]- Tessellation Shader로 구현한 Bazier Spline{title}
B-Spline
- Cubic B-Spline : \(\displaystyle P(u) = \sum_{i=3}^{n} P_{i}B_{i,3}(u) \implies P(u)= T_{i} M G_{i}\begin{matrix}& (\text{for }u_{i} \leq u < u_{i+1}) \end{matrix}\)
- \(P_{i} =\) Control Point
- \(T_{i} = \begin{bmatrix} (u-u_{i})^3 &(u - u_{i})^2 & (u-u_{i}) & 1\end{bmatrix}\)
- \(\displaystyle M = \frac{1}{6} \begin{bmatrix}-1& 3 & -3 & 1 \\ 3 & -6 & 3&0 \\ -3 & 0 & 3 & 0 \\ 1 & 4 & 1 &0\end{bmatrix}\)
- \(G_{i} = \begin{bmatrix} p_{i-3} \\ p_{i-2}\\ p_{i-1}\\ p_{i} \end{bmatrix}\)
- General B-Spline : \(\displaystyle P(u) = \sum_{i=d}^{n} P_{i}B_{i,d}(u)\)
- \(n\) = Control Point의 개수
- \(d\) = degree + 1.
- \(\displaystyle B_{i,d}(u) = \frac{u - u_{i}}{u_{i+d-1} - u_{i}} B_{i,d-1}(u) + \frac{u_{i+d} - u}{u_{i+d} - u_{i+1}} B_{i+1,d-1}(u)\)
- \(B_{i,1}(u) = \begin{cases} 1 & \text{if } u_{i} \leq u \leq u_{i+1} \\ 0 & \text{otherwise} \end{cases}\)
- Basic Function 자체가 재귀적으로 정의된다.
Cubic B-Spline은 3차 다항식 곡선을 이어서 붙인 Spline과 같다. Bezier Spline과의 차이점은 (1) Basis Function이 다르고, (2) Bezier Spline의 경우 u의 Interval이 1로 고정이었지만 B-Spline은 Knot Vector를 만듦으로써 Interval를 사용자 지정할 수 있다.
Knot Vector와 모든 컨트롤 포인트 점을 Uniform 변수로 입력받으면 된다. Knot Vector를 정의하는 방법은 다음과 같다.
- Control Point 수 + 차수 + 1 Size의 벡터를 정의한다.
- 시작과 끝의 Knot 값을 Degree만큼 반복한다.
- 예를들어, 컨트롤 포인트가 6개고 Cubix B-Spline이면 \([0,0,0,1,2,3,4,4,4]\) 처럼 만든다.
앞 뒤의 Knot를 Degree만큼 반복하므로써 시작과 끝이 Control Point를 반드시 지나게 된다.
파라미터 \(u \in [u_{i}, u_{i+1})\) 범위에 영향을 미치는 Control Parameter가 \(p_{i-3}, p_{i-2}, p_{i-1}, p_{i}\)로 설정되어 있다. 그 이유는 Knot Vector와 관련있다.
매듭이 구간에 고르게 분포되면 Uniform Know Vector, 균일하지 않게 분포하면 Non-uniform Knot Vector라고 한다. ` 구현은 De Boor’s algorithm을 사용함.
NURBS
Non-uniform rational B-Spline.
- Rational B-Splines : 컨트롤 포인트에 가중치를 부여 얼마나 컨트롤 포인트에 영향을 받을거냐를 설정할 수 있다.
Catmull-Rom Spline
- \(P(u) = \left[ \begin{matrix} u^3 & u^2 & u & 1 \end{matrix} \right] \left[ \begin{matrix} -0.5 & 1.5 & -1.5 & 0.5 \\ 1 & -2.5 & 2 & -0.5 \\ -0.5 & 0 & 0.5 & 0 \\ 0 & 1 & 0 & 0 \end{matrix} \right] \left[ \begin{matrix} p_{i-1} \\ p_{i} \\ p_{i+1} \\ p_{i+2} \end{matrix} \right]\)
컨트롤 포인트 \(p_{i}, p_{i+1}\) 사이의 곡선을 보간한다. \(p_{i-1}, p_{i+2}\)는 계산에만 사용되는 Control Point이다.