가상현실 4. 시각으로 어떻게 정보를 받아들일까
시각
사용자의 눈에 도달할 비치 파장, 강도, 각도를 이해하려면 눈의 광학 구조와 수용체 분포를 숙지해야 한다.
눈의 광학 구조는 어떻게 되는가?
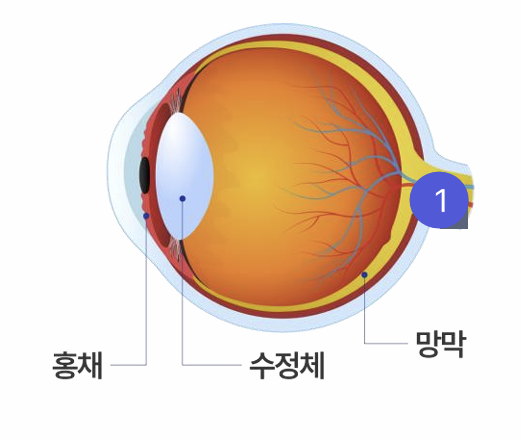
(1) 홍채 Iris 작은 구멍의 지름을 조절하여 들어오는 빛의 양을 조절한다. 작은 구멍을 동공이라 부른다.
동공이 언제 확대되고, 언제 축소되는지 알면 사용자에게 최적의 빛의 밝기를 제공할 수 있을 것이다.
(2) 수정체 Lens 두께를 조절하여 망막의 중심부로 상을 맺히게 만든다. 즉 초점 조절 역할을 한다.
(3) 망막 Retina 시각 자극이 최종적으로 맺히는 내벽이다. 망막에는 여러 종류의 시세포photoreceptor가 존재하여 시세포가 빛 정보를 감지한다.
그리고 망막은 photoreceptor가 몰려있는 중심부와, 그렇지 않은 주변부로 구분한다.
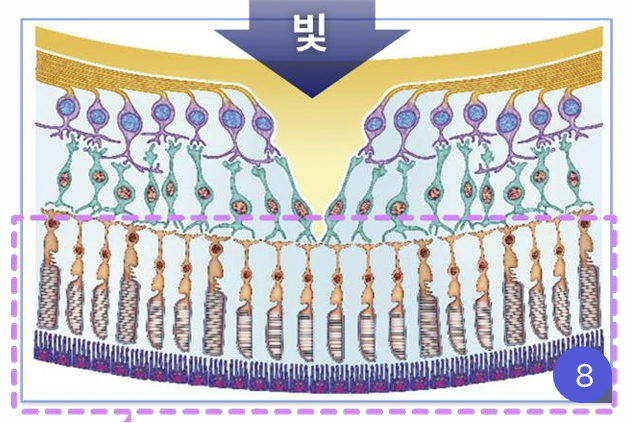
Photoreceptors
Photoreceptors (시세포, 광수용체)는 Cone과 Rod 세포로 구분한다.
(1) Cone 중심부에 집중되어 있는 세포다. 빛이 충분할 때 색상과 디테일을 정밀하게 감지한다.
(2) Rod 주변부 망막 전반에 걸쳐 분포하는 세포다. 빛이 충분하지 않을 때 운동·명암을 감지한다. 색을 구분할 수 없다.
빛을 인지하는 반응 속도는 Rod가 더 빠르고, Cone은 그에 비해 느리다.
[!tip] Blind Spot의 원리{title}
망막에는 photoreceptor가 전혀 없는 부위(optic disc)가 존재한다. 이 구간에 빛이 들어오면 감지할 수 없다. 그러나 뇌는 그 주변 시세포로 들어온 빛을 통해 그 구간을 보간한다. 즉 실제로 비어있는 구간이지만, 뇌가 정보를 보간하여 연속된 것처럼 보이게 한다.
그렇다면, 시세포가 받아들인 빛 정보는 어떻게 뇌로 전달될까? (감각)
Cone을 통해 받아들인 정보는 P 경로를 타고 LGN Parvo 층을 거쳐 Ventral Pathway로 전달된다.
- P 경로를 이루는 세포층을 Parvo Cell라고 하며, 이 세포층은 형상·공간·색상 정보를 보존하며 LGN Parvo층으로 전달한다.
- LGN은 마치 영상처리 알고리즘과 같다. 영상 정보를 전처리·필터링하여 Ventral Pathway로 전달한다.
- Ventral Pathway에서 Shape, Color, Texture, 높은 해상도(High visual acuity) 정보를 처리한다.
- 많은 정보를 정확하게 처리해야 하므로 상대적으로 반응속도가 느리다.
- 중요한 정보이므로, 처리된 정보는 기억에 저장되어 후에 인지나 판단에 활용된다.
**Rod를 통해 받아들인 정보는 두가지 경로로 전달된다.
- Primitive Visual Pathway 경로를 타고 Superior Colliculus로 전달된다.
- Superior Colliculus는 Efferent Motion을 관장한다.
- Efferent이란 뇌에서 눈 근육으로 전달하는 명령 신호다. 정보를 받아, Superior Colliculus는 안구의 반사적 움직임을 제어한다.
- M 경로를 타고 LGN Magno 층을 거쳐 Dorsal Pathway로 전달된다.
- M 경로를 이루는 세포층을 Magno Cell라고 하며, 모션 정보를 보존하며 LGN Magno층으로 전달한다.
- LGN에서 모션 정보를 전처리·필터링한다.
- Dorsal Pathway에서 Motion, Depth, Location, 명암 대비(Luminance Contrast) 정보를 처리한다.
- 반응 속도가 빠르다.
- 빠른 변화 포착으로 실시간 행동 제어와, 위험 회피에 활용된다.
정리하면, 시세포를 통해 받아들인 정보는 Primitive Visual Pathway와 Primary Pathway를 거친다. Primitive VIsual Pathway로 전달된 정보는 Superior Colliculus로 전달되어 안구의 본능적 움직임에 활용된다. Primary Pathway는 Ventral Pathway, Dorsal Pathway 두가지로 구분할 수 있다. 이 경로로 전달된 정보는 Visual Cortex로 전달된다. Visual Cortex로 전달되면 최종적으로 시각 정보가 고차원적으로 해석된다.
Cone에 맺히는 영역을 중심시Central Vision라고 한다. 중심시는 해상도가 매우 높고, 색깔을 구분한다. 그러나반응속도가 좀 떨어지는 특징이 있따.
Rod에 맺히는 영역을 주변시Peripheral Vision라고 한다. 주변시는 해상도가 낮고, 색깔을 구분할 수 없지만 반응 속도가 높다. 따라서 빠르게 움직이는 물체나 주변 환경 변화 감지에 유리하다.
이를 모두 고려하여 VR 시스템을 어떻게 만들어야 할까? 먼저 시야각이다. 주변시를 고려하여, 대략 300도 이상의 넓이를 제공해야 한다. 사람의 시야는 200도고, 머리를 약간 돌리면 순간적으로 250~300도까지 볼 수 있다. 딜레이를 고려하면, 미리 300도까지 제공하는 것이 자연스럽다.
그리고 중심시는 약 2도정도의 영역이다. 따라서 VR 시스템에선 이 중심시야만 고해상도로 렌더링하고, 나머지 부분은 저해상도로 렌더링해도 충분하다. 이를 foveated rendering 기법이라 한다.
만약 사용자가 머리를 움직이면, 렌더링해야하는 중심시 영역도 바뀐다. 따라서 사용자의 머리를 계속 추적해야 한다. 이를 Head Parallax라고 한다. HMD에서는 장착된 트래킹 장치가 머리의 위치와 방향을 실시간으로 추적한다.
P 경로를 통해 정보가 전달되는 딜레이는 약 5ms고, M 경로를 통해 정보가 전달되는 딜레이는 약 2~3ms다. 이후 Primary Pathway를 통해 전달되는 추가 딜레이가 존재한다. 이를 고려할 때, VR 기기는 Head Parallax를 감지하고 디스플레이에 반영하는 딜레이가 20ms보다는 낮아야 멀미가 줄어든다.
그래서, 시각 정보를 통해 뇌는 무엇을 인지하는가?
(1) 명도 Brghtness
(2) Color
Visual Acuity